







收藏商品(已有
0
人收藏)

店内搜
商品排行
 春夏chic打底针织吊带背心女外穿韩版小清新学生修身纯色内搭上衣
¥15.60
已售:0件
春夏chic打底针织吊带背心女外穿韩版小清新学生修身纯色内搭上衣
¥15.60
已售:0件
 轻奢女装百搭包臀半身裙气质优雅高腰中长裙
¥72.00
已售:0件
轻奢女装百搭包臀半身裙气质优雅高腰中长裙
¥72.00
已售:0件
 法式复古长袖连衣裙新款早秋韩国黑裙宽松女装
¥93.60
已售:0件
法式复古长袖连衣裙新款早秋韩国黑裙宽松女装
¥93.60
已售:0件
 休闲小V领长袖t恤女装2019新款韩版内搭上衣服紧身薄款打底衫春秋
¥19.20
已售:0件
休闲小V领长袖t恤女装2019新款韩版内搭上衣服紧身薄款打底衫春秋
¥19.20
已售:0件
 【盛宏】M家经典大衣双面羊绒大衣毛呢外套女水波纹羊绒大衣7202
¥900.00
已售:0件
【盛宏】M家经典大衣双面羊绒大衣毛呢外套女水波纹羊绒大衣7202
¥900.00
已售:0件
 早秋秋季棉长袖t恤女士大码女装宽松上衣纯色打底衫
¥26.40
已售:0件
早秋秋季棉长袖t恤女士大码女装宽松上衣纯色打底衫
¥26.40
已售:0件
 2020夏季新款品牌女装v领波点荷叶边裙气质轻熟雪纺连衣裙
¥130.80
已售:0件
2020夏季新款品牌女装v领波点荷叶边裙气质轻熟雪纺连衣裙
¥130.80
已售:0件
 修身小吊带背心女夏外穿紧身百搭纯棉短款工字大码女装打底
¥5.40
已售:0件
修身小吊带背心女夏外穿紧身百搭纯棉短款工字大码女装打底
¥5.40
已售:0件
 2020夏季新款品牌女装v领纯色拼接a字裙淑女显瘦雪纺连衣裙
¥118.80
已售:0件
2020夏季新款品牌女装v领纯色拼接a字裙淑女显瘦雪纺连衣裙
¥118.80
已售:0件
 时尚名媛定制2020秋装印花雪纺连衣裙显瘦遮肉飘逸长裙女减龄气质
¥79.60
已售:0件
时尚名媛定制2020秋装印花雪纺连衣裙显瘦遮肉飘逸长裙女减龄气质
¥79.60
已售:0件
- 商品详情
- 累计评论0
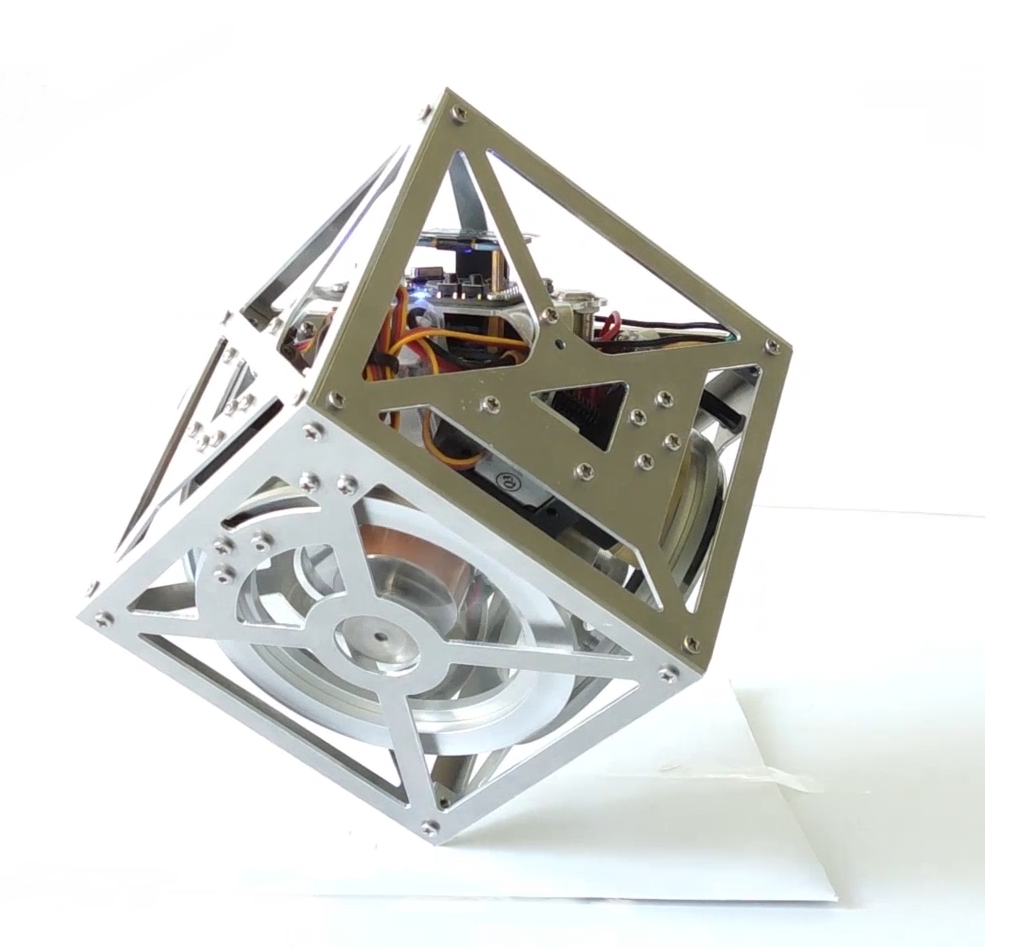
一. 机电一体化设计和制造
1.1 电机和电调
电机:Maxon EC-45-flat 50W
电调:Maxon DEC 36/2 modules,digital four quadrant brushless,已停产,选用同类型Maxon电调
电调必须能保证在高频下能提供精准的力矩,并保持和电流的线性关系。像ETH Zurich选用的Maxon电机,就能在不加减速器的情况下还有每安培36.9毫牛的高输出。
1.2 倾角估计
整个系统的角度是由六个加速度计,三组加速度计对估计出来的,没有用陀螺仪。一维模型是用两个共轴加速度计的原始数据做差得到的,三维模型则用第五篇论文[5]里提到的最小二乘法来估计。
1.3 刹车
直接用飞轮加刹车皮,很难做到完全刹死。如果不能快速将速度降到零,整个跳起的动作就无法完成,需要用好一点的刹车系统,正在测试自行车的碟刹器。
二. 系统动力学
2.1 非线性运动学和动力学
在第二篇论文中,和四旋翼动力学类似,取水平为空间坐标系,立起来为体坐标系,选zyx欧拉角建模。经过分析对线动量,角动量,外力和外力矩守恒的凯恩方程,算出了在空间坐标系下角速度关于zyx欧拉角的关系式。这个关系是非线性而且耦合的,得先线性化,和四旋翼控制很像。
在第三篇论文中,引入了拉格朗日值和广义动量,开始没看明白,后来发现能大大简化状态空间的表达。
2.2 线性化
在直立平衡点做线性化。取三个欧拉角,外框角速度,和飞轮角速度九个状态建模。
三. 状态空间识别
第一版在一维模型中选用支架角度,支架角速度,和飞轮角速度建模,中规中矩。
第二版在三维模型中选用支架欧拉角,欧拉角速度,和飞轮角速度建模,状态数从一维的三个升到了三位的九个,虽然其中有一个状态不可测,四个状态不可控。
第三版引入了广义动量,开始看不懂为什么,硬着头皮看到了第四版...先把广义动量的定义放在这:
系统的拉格朗日值是:支架的广义动量是 :飞轮的广义动量是 :
[1] M. Gajamohan, M. Merz, I. Thommen, and R. D’Andrea, “The Cubli:
A cube that can jump up and balance”, in IEEE/RSJ International
Conference on Intelligent Robots and Systems (IROS), 2012, pp. 3722–
3727.
[2] M. Gajamohan, M. Muehlebach, T. Widmer, and R. D'Andrea, “The
Cubli: A reaction wheel based 3D inverted pendulum”, in Proceedings
of the European Control Conference, 2013.
[3] M. Muehlebach, M. Gajamohan, and R. D'Andrea, "Nonlinear analysis and control of a reaction wheel-based 3D inverted
pendulum", In Conference on Decision and Control, pages 1283–1288,
2013.
[4] M. Muehlebach, and R. D'Andrea, "Nonlinear Analysis and Control of a Reaction Wheel-Based 3-D Inverted Pendulum", IEEE Transactions on Control Systems Technology, 2016
[5] S. Trimpe and R. D’Andrea, “Accelerometer-based tilt estimation of
a rigid body with only rotational degrees of freedom,” in Robotics
and Automation (ICRA), 2010 IEEE International Conference on, May
- 2010, pp. 2630 –2636